|
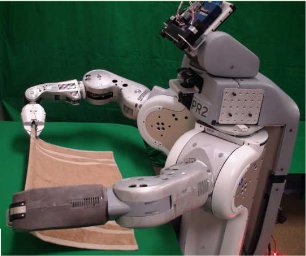
Учёные из Калифорнийского университета в Беркли впервые обучили робота взаимодействию с деформирующимися объектами. Как ни странно, но только сейчас техникам удалось научить машину работать с мягкими и, главное, легко и непредсказуемо меняющими форму предметами. Робототехническую платформу для опыта предоставила компания Willow Garage.
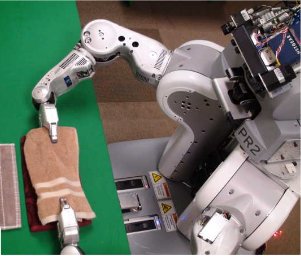
Исследователи из Беркли создали алгоритм, который позволил роботу PR2 от Willow Garage складывать в ровные стопки заранее неизвестные ему полотенца разных форм, цветов и сделанные из различных материалов. Кстати, это тот самый робот, который ранее самостоятельно ездил по зданию и искал розетки для собственной подзарядки.
Робот оснащен сенсорами на голове, руках и основании. На голове монтируются две стерео камеры, светодиодный модулирующий прожектор и лазерный дальномер. Компьютер оснащен процессором Intel Core 2 Quad 2.5GHz. Коммерческая версия данного робота работает под управлением двух бортовых серверов, каждый оснащён 8-ми ядерным Core i7 Xeon, 24Гб ОЗУ и 500 Гб НЖМД, плюс, для логов используется 1.5Тб внешний диск.
Для обработки видео потока и алгоритма распознавания образов используются GPU-вычисления на карте Nvidia GeForce 295 GTX. Для взаимодействия между датчиками, моторами, сенсорами, и обработки диагностической информации используется протокол EtherCAT.
Работает робот под управлением Linux c RealTime-патчами и фреймворком ROS (Robot Operation System).
Возврат к списку новостей |